1、中心简介
2023年11月,机器人国产自主智能控制技术创新与转化中心(以下简称“中心”)是吉林省教育厅为推进高等职业院校技术创新与成果转化而设立的重要平台。该中心面向机器人智能控制领域,自主国产自主可控技术,对接吉林省高质量发展战略,聚焦新技术,立足本校实际,确定中心“3-1-1”主要目标,既打造3个平台,制定1套机制,培养1只队伍,支撑“技术创新-转化推广-产教融合“的基本方针。中心主要功能与任务:
技术创新:中心聚焦机器人国产自主智能控制技术的关键领域,开展前沿性、探索性的研究,突破技术瓶颈,形成具有自主知识产权的核心技术。
成果转化:将研究成果及时转化为实际应用产品,推动技术成果的市场化、产业化进程,服务地方经济发展和产业转型升级。
人才培养:依托科研项目和成果转化工作,培养一批具备创新精神和实践能力的机器人技术专业人才,为行业发展提供有力的人才支撑。
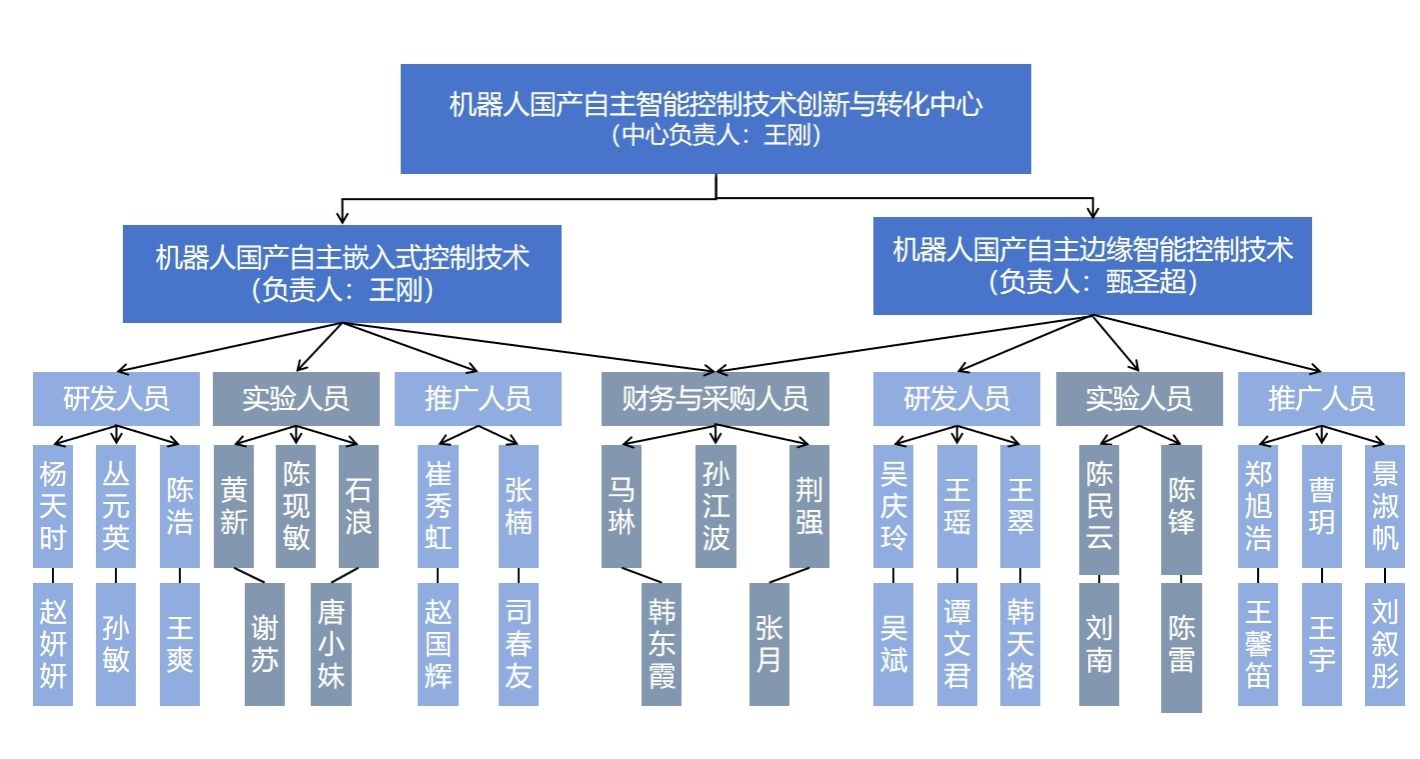
2、中心团队信息
3、中心实验设备
(1)工业3D视觉引导机器人开发平台
平台基于智能制造相关的3D成像与定位引导技术,通过3D相机完成被测物体的三维位姿,定位获取被测物体的位置信息,并引导机器人完成执行任务。

(2)工业智能视觉缺陷检测科研创新平台
平台包括工业相机、工业光源、深度学习模块、视觉软件及其他配套设备,通过深度学习算法获取缺陷物体的相关信息。


(3)远程协作智能仿生机器人科研平台
平台通过动捕手套,对使用者手部动作实时捕捉,并通过无线传输,远程实时操控灵巧手做出相应同步动作。涵盖多传感融合技术,机械结构设计与多自由度电机控制技术,新型人机交互技术等多学科交叉融合。


(4)自主移动机器人创新平台与机器人关键技术仿真与算法工作站
平台助力以下科研任务功能:
①室内外自动驾驶功能;
②目标识别功能;
③激光雷达避障功能;
④数字孪生功能。
工作站助力以下科研任务功能:
①还原机器人三维模型,支持在虚拟环境中进行场景的测试和分析;
②提供虚拟激光雷达,获取仿真环境中虚拟激光雷达与物体之间的距离;
③ROS中实时显示点云数据,用于测试和验证感知算法、SLAM生成地图;
④提供虚拟深度相机,可获取虚拟环境中的RGB图像和深度图像;
⑤利用深度学习,图像识别等算法完成车道线检测,交通标志识别的功能。

(5)全地形四足移动机器人创新平台
平台适用于高校机器人教学和实验室研究,涵盖人工智能和自动驾驶方向,平台拥有机器人本体以及所需的各种传感器,可研究复杂路况下的行走技术,通过该系统进行四足运动控制、动态平衡、机器视觉、路径规划,感知融合、机械臂协同抓取等多方面的开发和测试,是一款难得的多功能复合开源平台。

(6)多关节水中机器人
多关节水下机器人是一种由功能载体与基本载体经连接关节串联构成的水下机器人,具有多个关节和多个自由度,能够在水下执行复杂的任务。
多关节水下机器人的关键技术包括:
动力学分析与建模:通过牛顿-欧拉法建立运动学和动力学方程,考虑水动力影响,提高运动控制效果。
水动力仿真:基于FLUENT软件进行水动力仿真,获取准确的水阻力系数和摩擦阻力系数,优化运动控制。
控制算法:采用模糊PID控制和神经网络滑模控制等算法,实现高效的路径跟踪和控制。


